Guidelines for tuning
Guidelines for tuning
General guidelines
- Study the dynamics of the process first. Turn the controller to the manual mode if it's possible, and do the step response test.
- Define the process gain K, time constant T, and dead time L.
- Calculate the parameters by using some method, for example Lambda or Ziegler-Nichols
- Test the controller in auto mode.
- If your are not satisfied with the result, change the parameters and test again.
Open loop step response
Study the process by doing the step response test. Keep the controller in manual mode and change the output.
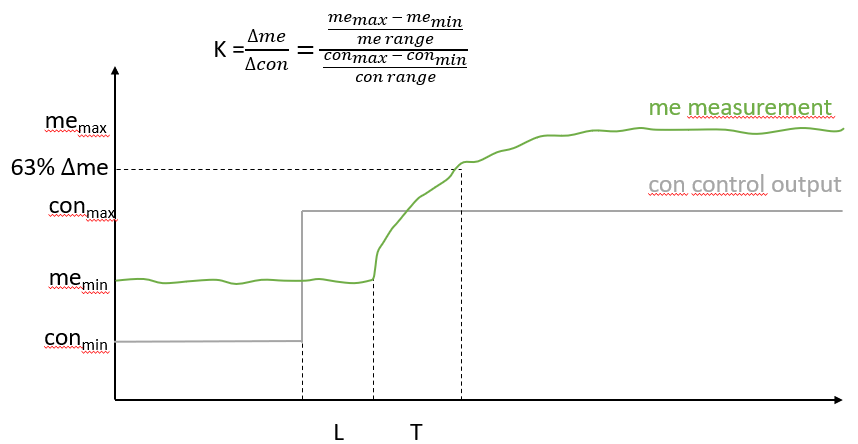
Figure 1 First order process response
Define the process parameters:
- K is the process gain
- T process time constant
- L delay (or dead time)
If the step response test gives the response shown below, it is an integrating process. Then calculate the process parameters K and L as shown below.
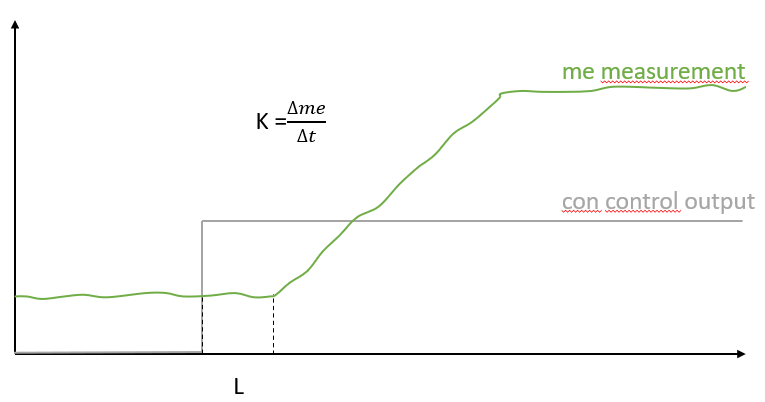
Figure 2 Integrating process
Tuning the controller
When the process parameters are known, you can use some method for calculating the tuning parameters.
Lambda method is one of the useful options. The K, T, and L have been got from the step response test. Now you have to choose suitable lambda value. Lambda is the wanted closed loop time constant. In the other words, you have to choose first the speed of the controller (closed loop time constant) and then calculate the parameters that will be used to achieve the result.
The lamda equations are shown in the figure below.
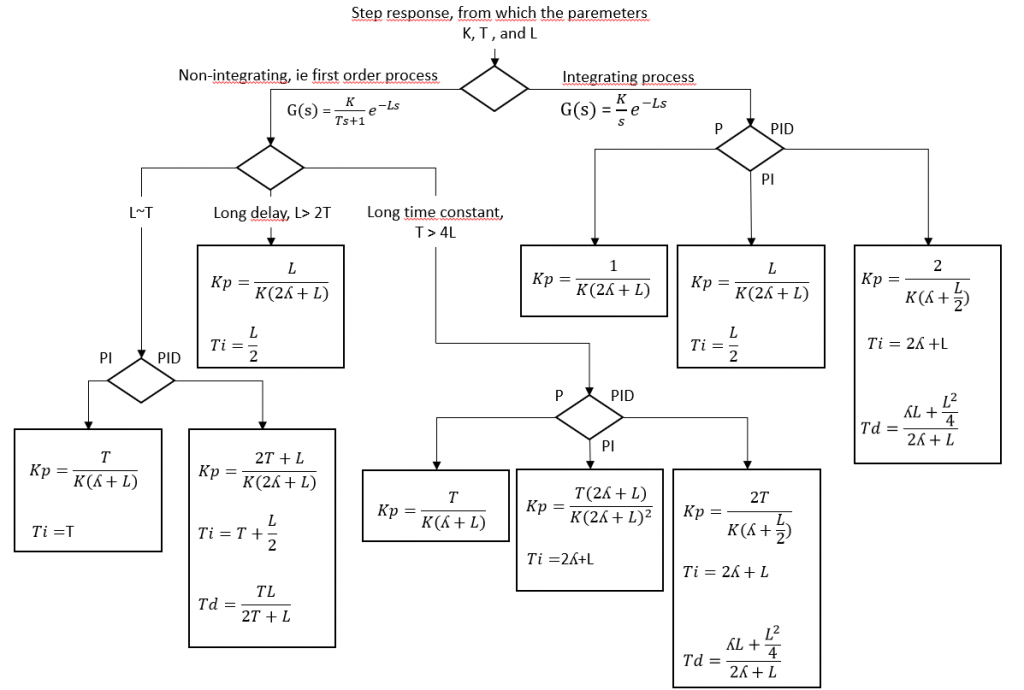
Figure 3 Lambda equations
When you have calculated the tuning parameters, you can try to test the controller. Give a suitable setpoint for the controller and change it to the auto mode. Wait that the process is stable, and then try to change the setpoint. If the controller is in balance, you will get the result as shown below. Now the time constant is about the same you gave as the lambda value.
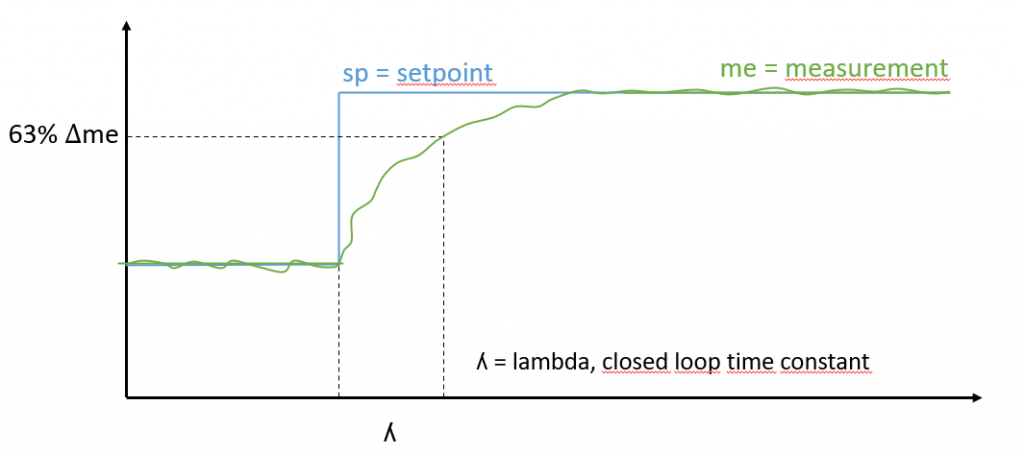
Figure 4 Closed loop step response
The following figure shows the key performance parameters of the control loop. This tuning is a too tight and it is overshooting. Typically this size of the overshoot is not allowed.
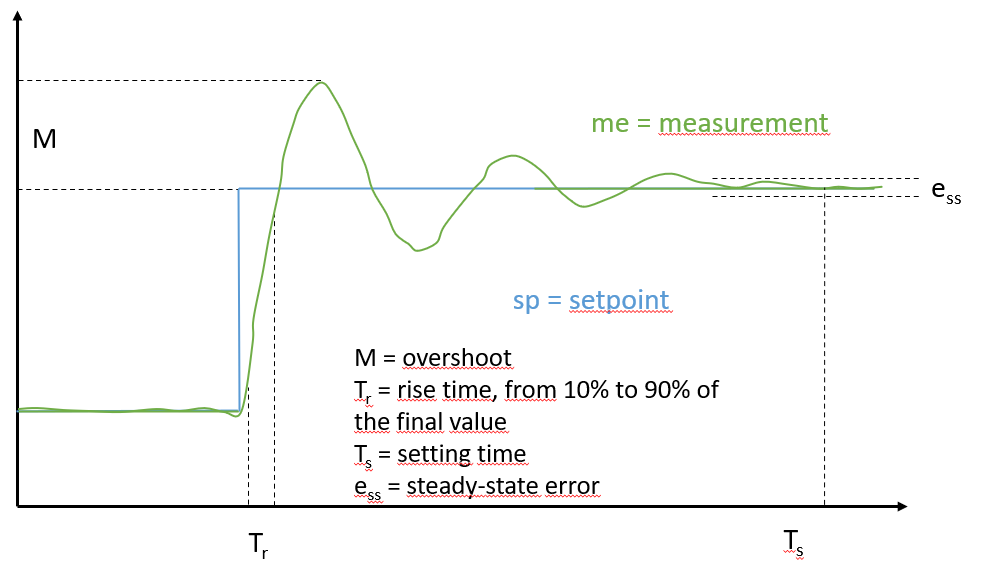
Figure 5 Control loop performance
Testing the tuning
- Set the tuning parameters for the controller.
- Give the setpoint, that is close to the current measurement. That way the controlling can be started at the steady state.
- Turn the controller on auto mode. Follow that the controller doesn't start to oscillate
- Change the setpoint. Observe the behavior of the control loop if the setpoint is reached, does it overshoot and is the speed desired.
- Follow the output of the controller as well. Are the moves smooth enough?
- If you are not satisfied with the performance, change the parameters and do the tests again.
- Try to do a disturbance that affects the process, if it is possible, and follow how the controller settle.
- The controller should correct the disturbance as well as the change of the setpoint.
- If the controller oscillates as the sine wave, the integration time Ti is too short.
- If the controller oscillates sharply, the gain Kp is too high. Try to divide the gain by two and follow if the oscillation settle down. If not, try to divide by two again.
Common principles
- The controller can be fast (short integration time) only, if the process is fast (short time constant).
- The fast can start to oscillate if the gain Kp is too high. For example, a flow controller can be more I controller than P. i.e low Kp (<1) and short Ti.
- If the time constant of the process is long, the controller has to be slow as well (longer Ti). Then the gain can be bigger in which case you stress the P term.
- You can stress the P term also when the delay is long, and reduce the I term (longer Ti).
- If the gain Kp = 1. The P term causes the amount of an error value change to the control output. i.e. 10 % of error value (in relation to the range) causes the 10 % change to the output.
- Assume that Ti = 10s and the Kp = 1, and the error value remains constant 10% (e=sp-me). Then the output increases 1% in 1s.